ROS2 自作 Turtlebot3 による 草刈りロボット開発。#8 Transformer で経路計画をする。
--- ROS2 ロボット自律走行の経路計画の補助に、機械学習(Transformer、LSTM)を使う。 ----
ROS2 自作 Turtlebot3 による 草刈りロボット開発。#6 Nav2 Planner を替えてみる で、ThetaStarPlanner を使って、Auto Mower 時の走行の直進性の改善がみられた。
しかし、まだおんちゃんが望む直進性能には、足りない。
そこで、ThetaStarPlanner の経路プランの一部補正として、機械学習が使えないか、無い知恵を絞って、考えてみた。
1. 概要
結論を先に言ってしまえば、経路プランに、Transformer、Lstm による、Speech To Text モデルのロジックを使えないだろうか? と言う話じゃ。
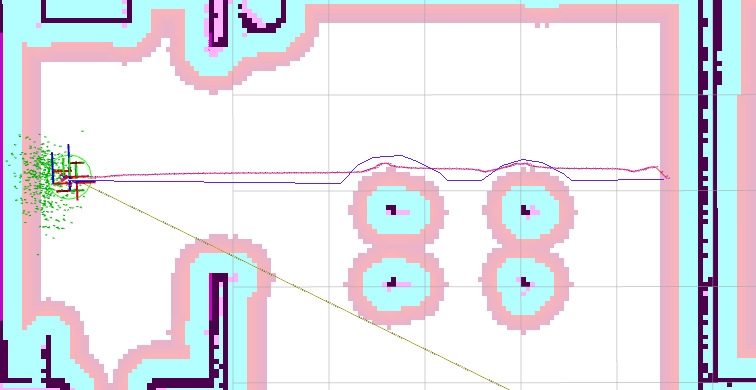
下の画像だと、赤線の経路を、青線の様にしたい。
障害物の手前まで真っ直ぐ進んで、障害物をなぞるように進んで、再度、スタートとストップの直線上に戻る、走行が欲しい。