Turtlebot3 の自作 #6
-- プリント基板 の製作 --
プリント基板と言っても、ユニバーサル基盤を使って、手造り基板の作成です。
但し、パーツの配置、配線は、全て手作業だと大変なので、ここは、Eagle を使ってみます。
Eagle を使うのも、何年ぶりか?すっかり忘れちょります。
この前使ったのは、PIC32MX で、USBマウス to PS/2 変換ボードを作った時以来です。
すっかり忘れているので、一から勉強しながらの製作です。
ここは、以前にもお世話になった、EAGLEプリント基板製作入門 を利用させて頂きます。
Eagle もバージョンが上がっているので、Eagle のバージョンアップから始めないといけないです。
ESP32 は、秋月電子の
Wi-Fiモジュール ESP-WROOM-32 DIP化キット です。
今回の、foxbot_core3 の回路図です。
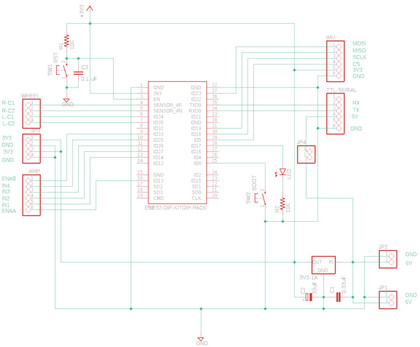
注1)
PIN2(3V3) - VCC 間のパスコンは、ESP-WROOM-32 DIP化キット に最初から付いているので、不要です。
ボードの基板です。
ユニバーサル基盤は、片面ガラス・ユニバーサル基板 Cタイプ(72×47.5mm) めっき仕上げ です。
赤:表面の配線
青:裏面の配線
自分でビニール線で配線するので、片面のボードでも大丈夫です。
表面から見た画像です。
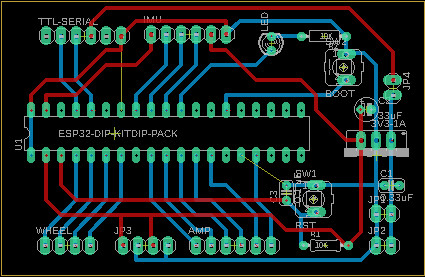
注1) GND から出ている、黄色線は、不要です。
注2) LED は、長いリード線側が、IO17 です。
一応、これで問題なく動作しています。
後は、Jetson Nano 2G に WiFI ドングル 、ROS、Trutlebot3 を入れて、Nano と ESP32 を UART接続すれば、一応 リモートPC から操作できる Turtlebot3 の完成ぞね。
その後。
どうやら、IMUセンサーが時々、調子悪いみたい。Device ID が、頻繁に取れなくなりました。また、購入しないといけないみたいです。
あと、IMU をつけて動かすと、モータ制御がいぜんよりスムーズさが無いきがします。
対策として、モータ制御 の部分を、ESP32 は、Dual Core なので、別コアのタスクとして
実行するようにしました。
また、サンプリング間隔を、それまでの、30ms から、20ms にしたら、幾分よくなった気がします。
将来的には、ESP32のかわりに、K210 をつかったら良いのかもしれません。